


 Brochure
Brochure Core Manuals
Core ManualsMP3300iec-RBT
MP3300iec-RBT Yaskawa Articulated Robots and up to 32 Axes
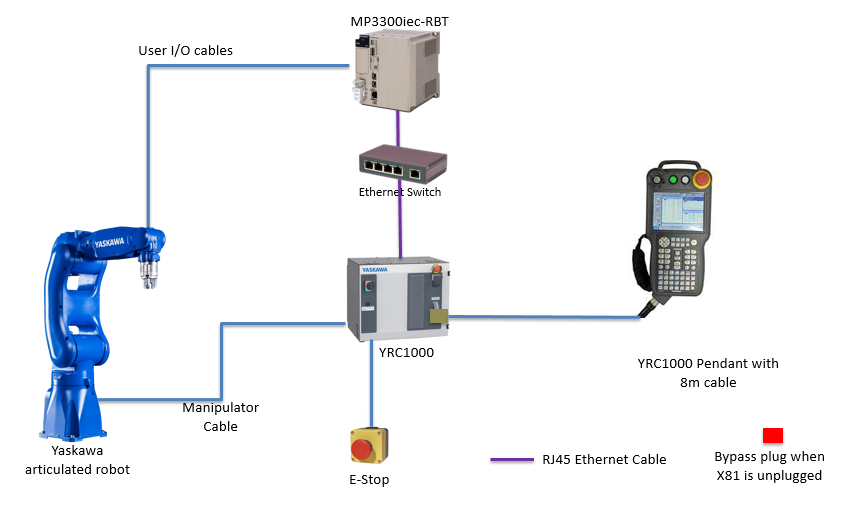
The MP3300iec-RBT is the next evolutionary step of the MPiec controller. It offers:
- Programming and control of Yaskawa delta and articulated robots
- IEC61131-3 and PLCopen programming standards
- MECHATROLINK-III motion network
- 1, 3 or 8 option modules
- 20 or 32 motion axes
MP3300iec-RBT Specifications
|
Item
|
Description
|
|---|---|
| MP3300iec-RBT Controller CPU Model Number |
PMC-U-MP33320-RBT (Medium Performance), 20-axis, IMI Connector, Robot Controller PMC-U-MP33532-RBT (High Performance), 32-axis, IMI Connector, Robot Controller PMC-U-MP33420-RBT (Medium Performance), 20-axis, RJ45 Connector, Robot Controller PMC-U-MP33632-RBT (High Performance), 32-axis, RJ45 Connector, Robot Controller |
| Supported Modules | LIO-01, LIO-02, LIO-04, LIO-05, LIO-06, AI-01, AO-01, DO-01 |
| Software | MotionWorks IEC Pro |
| CPU | 800 Mhz or 1.2 GHz |
| Number of option module slots | 1, 3 or 8 |
| User Variable Memory | 32 MB |
| Power Unit | Input Voltage: 24VDC or 100/200VACInput Current: 1.0 A max (at rated input/output) for 1 slot module 1.5 A max (at rated input/output) for 3 slots module 1.5 A max (at rated input/output) for 8 slots DC module 3.0 A max (at rated input/output) for 8 slots AC module Battery: |
| Motion Network | MECHATROLINK-III: 1 channel, 2 connectors SERVOPACK and I/O for up to 20 slave nodes connectable (SERVOPACK for up to 20 axes) Baud rate: 100 Mbps (MECHATROLINK-III) |
| Communication Function | Ethernet: 10Base-T or 100Base-TX |
| Ethernet Protocols | Ethernet/IP and Modbus TCP/IP standard on all units, User specific protocols can be written using Y_DeviceComm firmware library
Motomansync to support remote control of Yaskawa delta and articulated robots |
| Calendar | Seconds, minutes, hour, day, week, month, year, day of week, and timing (battery backup) |
| Environmental Conditions | Ambient Operating Temperature: 0°C to 60°C (Forced cooling is required if 55°C is exceeded.)Ambient Storage Temperature: -25°C to 85°C Ambient Operating Humidity: Ambient Storage Humidity: Pollution Level: Corrosive Gas: Operating Altitude: |
| Mechanical Conditions | Vibration Resistance: Conforming to JIS B 3502:
Shock Resistance: |
| Electrical Operating Conditions | Noise Resistance: Conforming to EN 61000-6-2, EN 61000-6-4 and EN 55011 (Group 1, Class A) Power supply noise (FT noise): 2 Kv min., for one minute Radiation noise (FT noise): 1 Kv min., for one minute Ground noise (impulse noise): 1 kV min., for 10 minutes Electrostatic noise (contact discharge method): 6 kV or more, 10 times |
| Installation Requirements | Ground: Ground to 100 Ω max. |
| Cooling Method: Natural cooling or forced-air cooling |
|
| Connectors | M-III: MECHATROLINK (IMI or RJ45), 2 connectors Ethernet: RJ 45: Ethernet RLY OUT: RLY OUT connector USB: DUSB-ARA42-T11A-FA (DDK), type A connector |
| Indicators | RDY(green), RUN(green), ALM(red), ERR(red), BAT(red), M-ALM(red) |
| Switches | STOP, E-INIT, INIT, CNFG, LOAD, TEST and MNT |
| Dimensions | 64 mm X 130 mm X 108 mm (W × H × D) with 1 slot module 120 mm X 130 mm X 108 mm (W × H × D) with 3 slots module 240 mm X 130 mm X 108 mm (W x H x D) with 8 slots module |
MP3300iec-RBT Specifications
|
Item
|
Description
|
|---|---|
| MP3300iec-RBT Controller CPU Model Number |
PMC-U-MP33320-RBT (Medium Performance), 20-axis, IMI Connector, Robot Controller PMC-U-MP33532-RBT (High Performance), 32-axis, IMI Connector, Robot Controller PMC-U-MP33420-RBT (Medium Performance), 20-axis, RJ45 Connector, Robot Controller PMC-U-MP33632-RBT (High Performance), 32-axis, RJ45 Connector, Robot Controller |
| Supported Modules | LIO-01, LIO-02, LIO-04, LIO-05, LIO-06, AI-01, AO-01, DO-01 |
| Software | MotionWorks IEC Pro |
| CPU | 800 Mhz or 1.2 GHz |
| Number of option module slots | 1, 3 or 8 |
| User Variable Memory | 32 MB |
| Power Unit | Input Voltage: 24VDC or 100/200VACInput Current: 1.0 A max (at rated input/output) for 1 slot module 1.5 A max (at rated input/output) for 3 slots module 1.5 A max (at rated input/output) for 8 slots DC module 3.0 A max (at rated input/output) for 8 slots AC module Battery: |
| Motion Network | MECHATROLINK-III: 1 channel, 2 connectors SERVOPACK and I/O for up to 20 slave nodes connectable (SERVOPACK for up to 20 axes) Baud rate: 100 Mbps (MECHATROLINK-III) |
| Communication Function | Ethernet: 10Base-T or 100Base-TX |
| Ethernet Protocols | Ethernet/IP and Modbus TCP/IP standard on all units, User specific protocols can be written using Y_DeviceComm firmware library
Motomansync to support remote control of Yaskawa delta and articulated robots |
| Calendar | Seconds, minutes, hour, day, week, month, year, day of week, and timing (battery backup) |
| Environmental Conditions | Ambient Operating Temperature: 0°C to 60°C (Forced cooling is required if 55°C is exceeded.)Ambient Storage Temperature: -25°C to 85°C Ambient Operating Humidity: Ambient Storage Humidity: Pollution Level: Corrosive Gas: Operating Altitude: |
| Mechanical Conditions | Vibration Resistance: Conforming to JIS B 3502:
Shock Resistance: |
| Electrical Operating Conditions | Noise Resistance: Conforming to EN 61000-6-2, EN 61000-6-4 and EN 55011 (Group 1, Class A) Power supply noise (FT noise): 2 Kv min., for one minute Radiation noise (FT noise): 1 Kv min., for one minute Ground noise (impulse noise): 1 kV min., for 10 minutes Electrostatic noise (contact discharge method): 6 kV or more, 10 times |
| Installation Requirements | Ground: Ground to 100 Ω max. |
| Cooling Method: Natural cooling or forced-air cooling |
|
| Connectors | M-III: MECHATROLINK (IMI or RJ45), 2 connectors Ethernet: RJ 45: Ethernet RLY OUT: RLY OUT connector USB: DUSB-ARA42-T11A-FA (DDK), type A connector |
| Indicators | RDY(green), RUN(green), ALM(red), ERR(red), BAT(red), M-ALM(red) |
| Switches | STOP, E-INIT, INIT, CNFG, LOAD, TEST and MNT |
| Dimensions | 64 mm X 130 mm X 108 mm (W × H × D) with 1 slot module 120 mm X 130 mm X 108 mm (W × H × D) with 3 slots module 240 mm X 130 mm X 108 mm (W x H x D) with 8 slots module |
MP3300iec-RBT MP3300iec-RBT Components
Complete your machine controller by adding option modules, accessories, and software development environments listed here.
Download MPiec Hardware Manual (Doc# YAI-SIA-IEC-7)
| Item | Part Number | Description |
|---|---|---|
| MP3300iec-RBT Controller CPU |
PMC-U-MP33320-RBT | (Medium Performance), 20-axis, IMI Connector, Robot Controller |
| PMC-U-MP33532-RBT | (High Performance), 32-axis, IMI Connector, Robot Controller | |
| PMC-U-MP33420-RBT | (Medium Performance), 20-axis, RJ45 Connector, Robot Controller | |
| PMC-U-MP33632-RBT | (High Performance), 32-axis, RJ45 Connector, Robot Controller | |
| Power Supply & Base Unit Rack | JEPMC-BU3304-E | 24VDC power supply with single slot base unit rack |
| JEPMC-BU3303-E | 24VDC power supply with three slot base unit rack | |
| JEPMC-BU3302-E | 24VDC power supply with eight slot base unit rack | |
| JEPMC-BU3301-E | 100/200VAC power supply with eight slot base unit rack | |
| Accessories | JEPMC-BA3001 | Replacement Battery |
| JEPMC-OP3301-1-E | Replacement CPU Faceplate | |
| JEPMC-OP3301-E | Option Slot Cover | |
| I/O Option Cards | JAPMC-AN2300 | Analog Inputs (AI-01) |
| JAPMC-AN2310 | Analog Outputs (AO-01) | |
| JAPMC-DO2300 | Digital Output Module (DO-01) | |
| JAPMC-IO2300-E | Digital I/O Module (LIO-01) | |
| JAPMC-IO2301-E | Digital I/O Module (LIO-02) | |
| JAPMC-IO2303 | Digital I/O Module (LIO-04) | |
| JAPMC-IO2304 | Digital I/O Module (LIO-05) | |
| JAPMC-IO2305-E | Multi-Function I/O Module (LIO-06) | |
| MECHATROLINK-III Cables | JEPMC-W6012-A2-E | 0.2m, IMI to IMI1 |
| JEPMC-W6012-A5-E | 0.5m, IMI to IMI1 | |
| JEPMC-W6012-01-E | 1.0m, IMI to IMI1 | |
| JEPMC-W6012-02-E | 2.0m, IMI to IMI1 | |
| JEPMC-W6012-03-E | 3.0m, IMI to IMI1 | |
| JEPMC-W6012-04-E | 4.0m, IMI to IMI1 | |
| JEPMC-W6012-05-E | 5.0m, IMI to IMI1 | |
| JEPMC-W6012-10-E | 10.0m, IMI to IMI1 | |
| JEPMC-W6012-20-E | 20.0m, IMI to IMI1 | |
| JEPMC-W6012-30-E | 30.0m, IMI to IMI1 | |
| JEPMC-W6012-50-E | 50.0m, IMI to IMI1 | |
| JZSP-CM3RMM0-00P2-E | 0.2m, RJ45 to IMI2 | |
| JZSP-CM3RMM0-00P5-E | 0.5m, RJ45 to IMI2 | |
| JZSP-CM3RMM0-01-E | 1.0m, RJ45 to IMI2 | |
| JZSP-CM3RMM0-03-E | 3.0m, RJ45 to IMI2 | |
| JZSP-CM3RMM0-05-E | 5.0m, RJ45 to IMI2 | |
| JZSP-CM3RMM0-10-E | 10.0m, RJ45 to IMI2 | |
| JZSP-CM3RM00-20-E | 20.0m, RJ45 to IMI2 | |
| JZSP-CM3RM00-30-E | 30.0m, RJ45 to IMI2 | |
| JZSP-CM3RM00-40-E | 40.0m, RJ45 to IMI2 | |
| JZSP-CM3RM00-50-E | 50.0m, RJ45 to IMI2 | |
| JZSP-CM3RRM0-00P2-E | 0.2m, RJ45 to IMI3 | |
| JZSP-CM3RRM0-00P5-E | 0.5m, RJ45 to IMI3 | |
| JZSP-CM3RRM0-01-E | 1.0m, RJ45 to RJ453 | |
| JZSP-CM3RRM0-03-E | 3.0m, RJ45 to RJ453 | |
| JZSP-CM3RRM0-05-E | 5.0m, RJ45 to RJ453 | |
| JZSP-CM3RRM0-10-E | 10.0m, RJ45 to RJ453 | |
| JZSP-CM3RR00-20-E | 20.0m, RJ45 to RJ453 | |
| JZSP-CM3RR00-30-E | 30.0m, RJ45 to RJ453 | |
| JZSP-CM3RR00-40-E | 40.0m, RJ45 to RJ453 | |
| JZSP-CM3RR00-50-E | 50.0m, RJ45 to RJ453 | |
| MECHATROLINK-III Network Accessories | JEPMC-MT2000-E | Hub, 8 Slave Ports |
| JEPMC-MT2020-E | Adaptor, Ethernet to Mechatrolink | |
| JEPMC-MTD2310-E | I/O Module; 64 In 64 Out |
- For Sigma-5 amp to Sigma-5 amp or Sigma-5 amp to IMI Controller
- For Sigma-7 amp to IMI Controller
- For Sigma-7 amp to Sigma-7 amp to Sigma-7 amp to RJ45 Controller







